Mission Planner, insansız hava, kara ve su araçlarının uzaktan otonom şekilde istenilen parametrelerle otonom veya farklı modlarla kontrol edilmesini sağlayan programdır. Aynı zamanda aracın üzerinde bulunan uçuş kontrol kartından gelen verileri Misssion Planner’ın arayüzü ile kullanıcıya sunar. Bu yazımızda yer istasyonu programı olan Mission Planner’in arayüzünü detayları ile inceleyeceğiz.
Yazımızı okumadan önce Mission Planner’e dair temel düzeyde bilgi edinmek için “Yer İstasyonu Programı Olan Mission Planner Nedir?” yazımızı okuyabilirsiniz.
HUD(HEADS-UP Display)
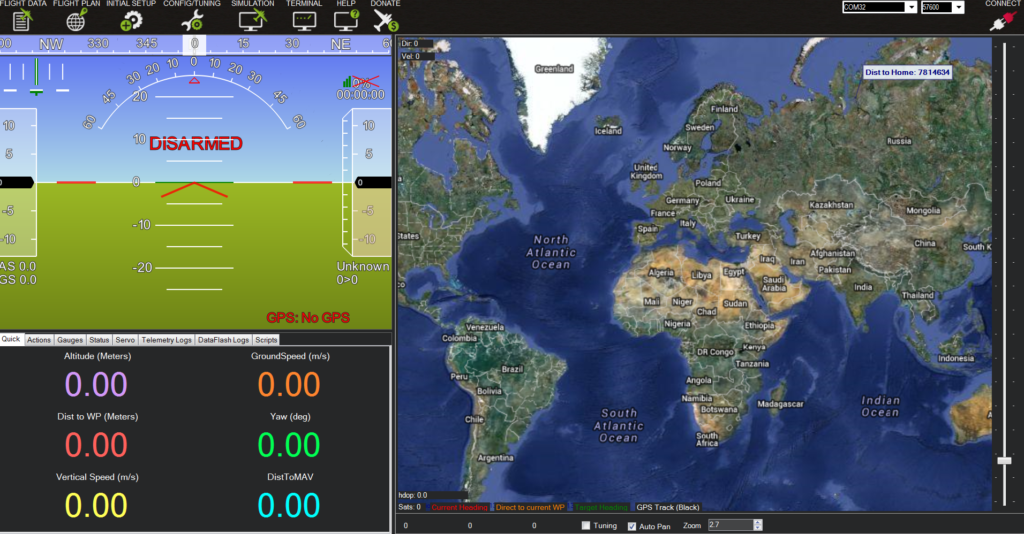
HUD ekranı Mission Planner’in ana ekranı olan flight data sekmesinde sol tarafta yer alır. Araç üzerinde bulunan uçuş kontrol kartı ile bilgisayara veya başka bir cihaza bağlı telemetri modülü ile bağlanarak canlı veri akışı sağlanır. Gelen veri HUD ekranında gösterilir. Aşağıda ekranın açıklanması yapılmıştır.
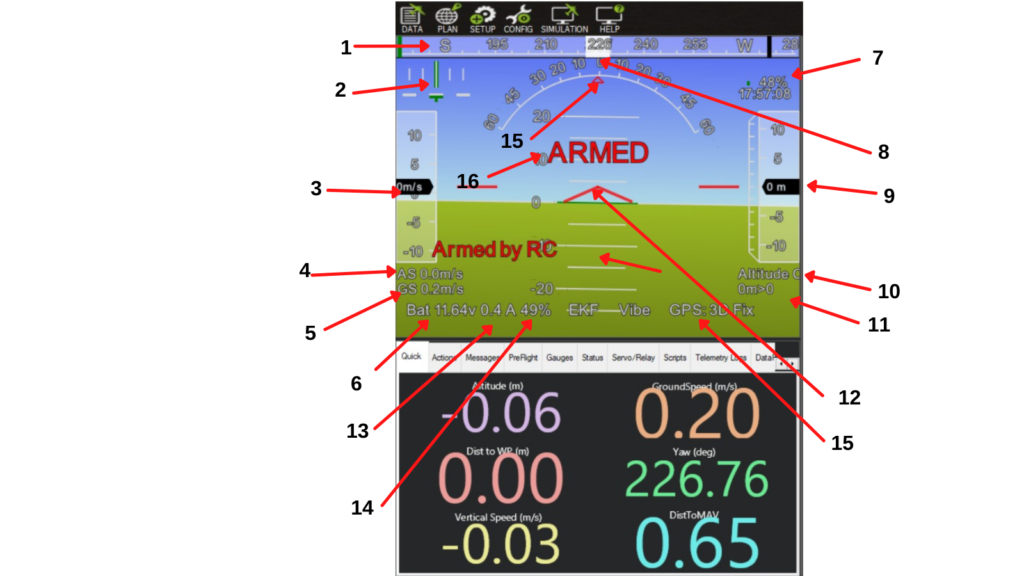
- Rotadan kaçma hatası ve dönüş hızı (T)
- Rotadan kaçma hatası ve dönüş hızı (T)
- Hava hızı (Hava hızı sensörü takılı değilse yer hızı)
- Hava Hızı
- Yer Hızı
- Aracın Batarya Değeri
- Telemetri bağlantı kalitesi (Yüzdelik değeri ile)
- Araç burnunun istikamet yönü
- Aracın toplam irtifası
- Uçuş modu
- Belirlenen konuma uzaklık > mevcut konum
- Hava aracının duruşu (yataya göre açılı)
- İHA’nın mevcut elektronik ekipmanının kullandığı akım miktarı
- pil doluluğunun yüzde kaç olduğu
- GPS’in mevcut çalışma durumu
Canlı Konum ve Yön Haritası

- Hava aracının burun kısmının istikamet yönü
- Hava aracının istenilen çaptaki dönüşü
- Hava aracının seyahat ederken GPS izi
- Anlık Waypoint’in doğrusal çizgisi
- GPS’in hava aracı üzerindeki yükseklik değeri
- Enlem
- Boylam
- İrtifa

Mission Planner ile Uçuş Planı Oluşturma
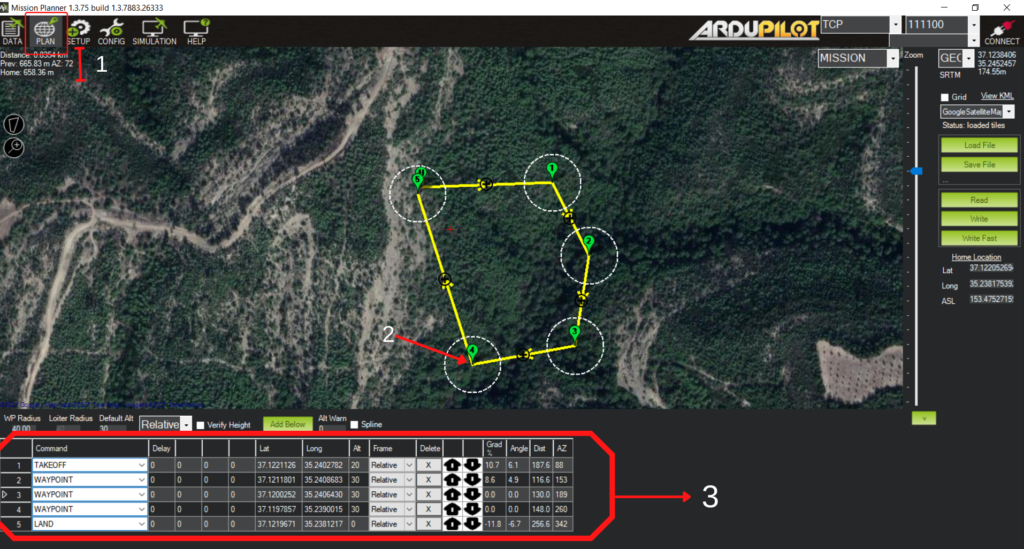
- Mission Planner arayüzünde üst kısımda bulunan “plan” butonundan otonom uçuş planlamasına ulaşılır.
- Hava aracının uçuş planına dayanarak toplam mesafe, anlık waypoint ile sonraki waypoint arası arasındaki mesafe, İHA’nın otonom şekilde hareket etmesi için waypointler)
- İkinci bölgede planlama yapılan waypointler’e görev ataması yapılır (iniş, kalkış, gimball hareketleri, hava aracı irtifa ayarları, istenilen konumda enlem ve boylam hareketleri)
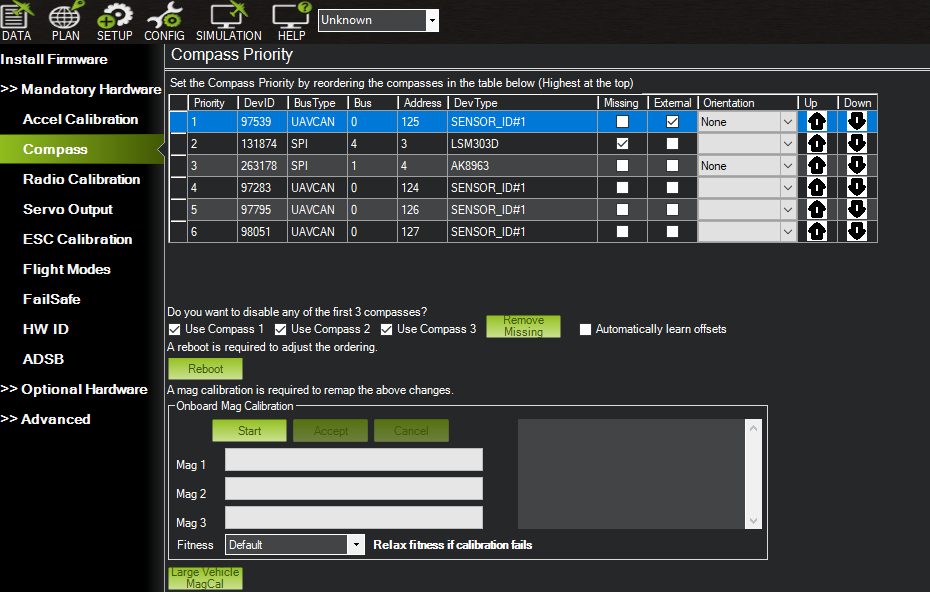
 SETUP
SETUP
 SETUP
SETUPMission Planner arayüzünde bulunan setup sekmesi araç üzerinde bulunan ardupilot tabanlı kontrol kartına uygun araç çeşidine (Quadcopter,hexacopter,sualtı rover,antena takibi,helicopter ve İKA) bağlı olarak uygun firmware yüklenmesini sağlar. Setup sekmesinin diğer özelliği de; uçuş kontrolcüsü üzerine bağlı olan ekipmanların (gps,telemtetri,kumanda alıcısı,joystick,bluetooth sensörü,anten takip sistemi) Mission Planner’de sorunsuz şekilde kullanmanız için denetimini sağlar. Aracın İMU,radio,pusula kalibrasyonu,uçuş modunun ayarlanması setup sekmesinden ayarlanır. Son sekmeden olarak mavlink terminaline ulaşabilirsiniz.
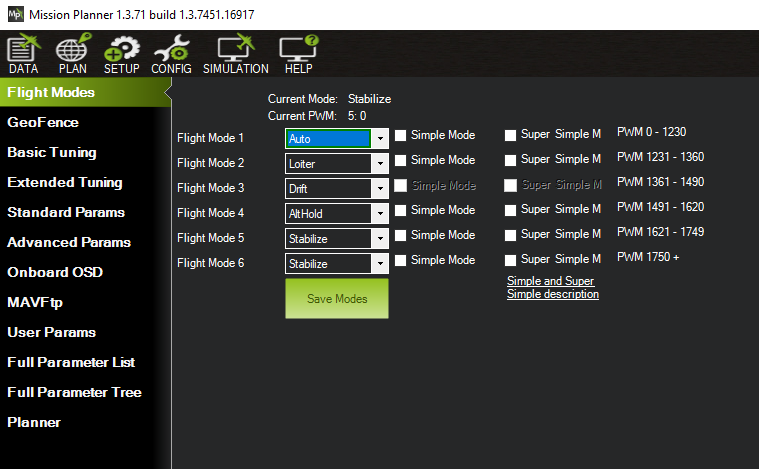
CONFiguration
 CONFiguration
CONFiguration CONFiguration sekmesi içinde ardupilot parametrelerinin ayarlanması, uçuş modlarının düzenlenmesi ve program genel arayüzü için değişiklikler yapılır. Roll ve pitch hassasiyeti, throttle hower ve tırmanma hassasiyeti ayarlanır.

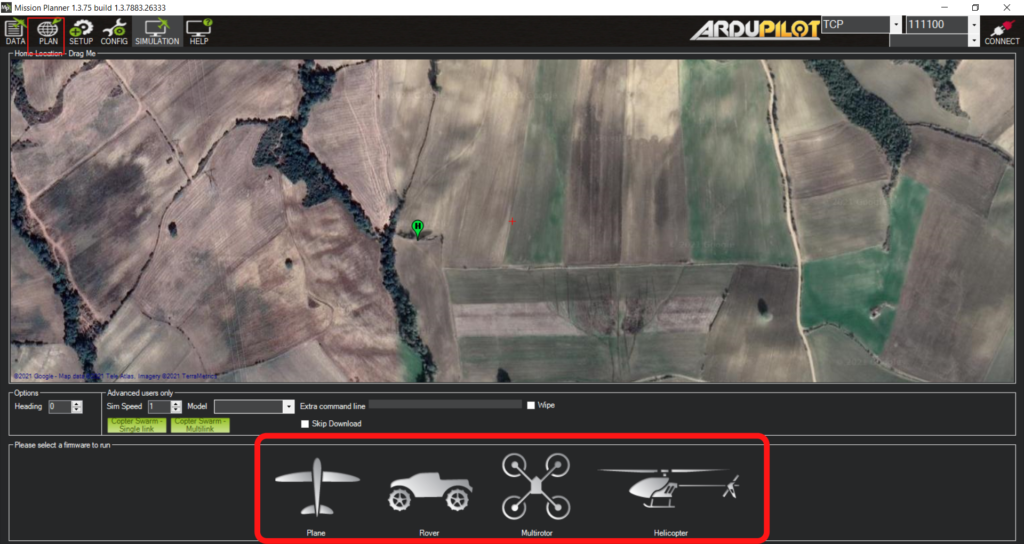
SIMULATION
Simulation sekmesi, bir SITL (Döngüdeki Yazılım) simülasyon özelliği sağlar. Her araç tipi için birçok tipik gövde tipi oluşturulmuştur. Bu görevlerdeki araçlar için beklenen davranışı görmenize veya bir kumanda takılıyken, araç simülasyonunu RC ileymiş gibi uçurabilmenizi/sürebilmenizi sağlar. Bu, önce aracınızı riske atmadan parametre değişikliklerinin araç davranışı üzerindeki potansiyel etkilerini görmenize veya görev oluşturmayı keşfetmenize olanak sağlar.