


Ardupilot otopilot yazılımının yapıtaşı olan Mission Planner programı, Türkiye dahil olmak üzere dünyanın birçok yerinde binlerce kullanıcıya sahiptir. Mission Planner programı kendi içinde birçok uçuş moduna sahiptir. Ardupilot programı yüklü olan uçuş kontrol kartının( Pixhawh,Cuav,navio, vb.) içerisindeki sensörlere göre farklı uçuş modlarının kullanılması olasıdır. Bu sayede , hava aracının istenilen göreve ve uçuş dinamiğine uygun olarak hareket etmesini sağlar.
Yer istasyonu programı olan Mission Planner’in kullanım amacı ve ne oluğuna dair detaylı bilgi almak için yazımızı okuyabilirsiniz
Avdeso Academy olarak Udemy’de “Mission Planner Yer Kontrol İstasyonu Eğitimi” eğitimimiz ile dronlara dair detaylı bilgiler kazanabilirsiniz.

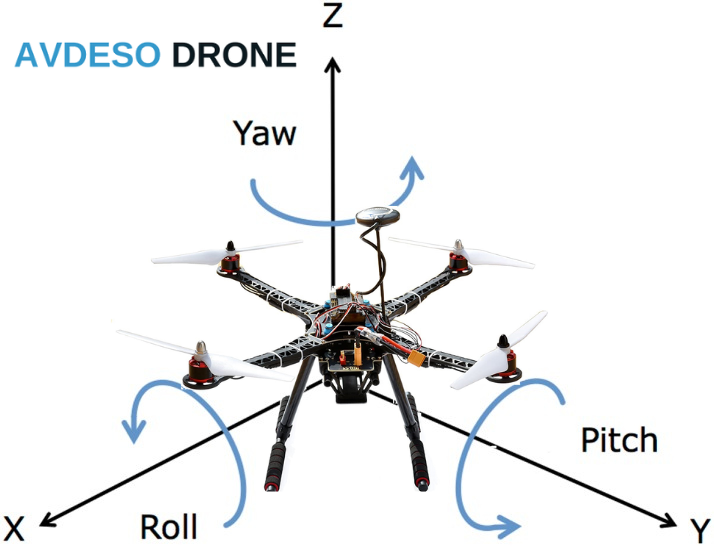
Dronların Hareket Eksenleri
Uçuş modlarının daha iyi anlaşılmasını sağlamak için aşağıdaki görselde drone üzerindeki hareket eksenlerini içeren bilgiler paylaşılmıştır.
Dronların temel uçma prensiplerini daha iyi anlamak için yazımızı okuyabilirsiniz.
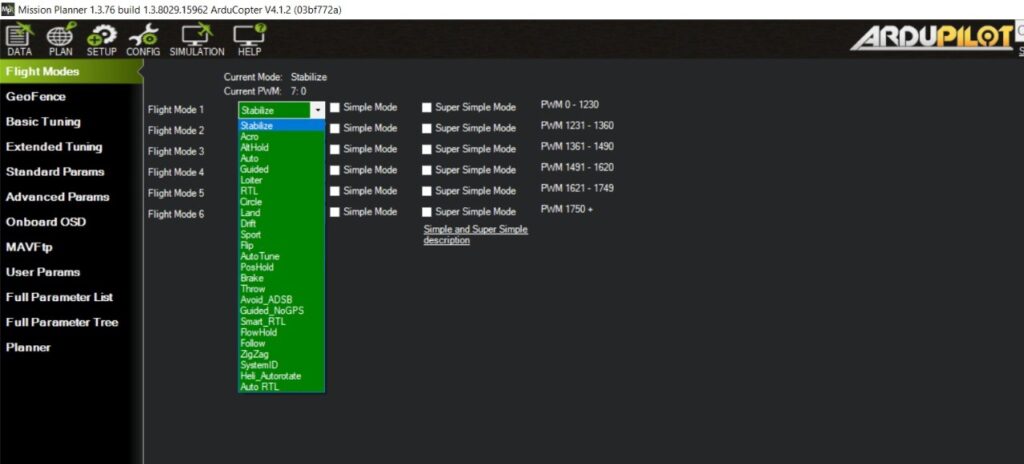
Mission Planner Üzerinde Uçuş Modu Seçimi Nasıl Yapılır?
Mission planner programı üzerinde uçuş modu seçimi için SETUP sekmesinden Flight Modes bölümünden gerçekleşir. RC kumanda kanalına uçuş modu ataması yapılır.
Mission Planner Uçuş Modları
- PosHold
- RTL
- Alt Hold
- Auto
- AutoTune
- Brake
- Circle
- Drift
- FlowHold
- Land
- Stabilize
- Throw
- Sport
- Simple/Super Simple
- ACRO
Youtube kanalımızda “Pixhawk Ardupilot Uçuş Modları” videomuzdan detaylı olarak izleyebilirsiniz.
1)PosHold
Poshold modu dronun ” havada askıda kalması” olarak nitelendirilir. İnsansız hava aracının konumu, yönü ve irtifası sabit şekilde kalır. GPS, barometre sensörü ve pusula sensörünün sistematik şekilde çalışması ile başarılı şekilde PosHold modu gerçekleşir.
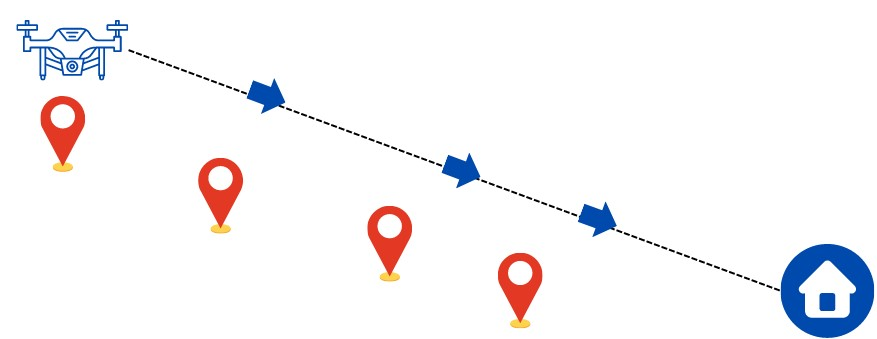
2)RTL(Return to lunch)
Tükçesi “başlangıç yerine dönüştür.” Dronun RTL modu aktif edildiği anda Mission Planner’da verilen yüksekliğin olduğu yerde yükselerek Home (başlangıç) noktasına dönüş sağlar. RTL modu, drone acil bir durumda failsafe moduna geçerse otomatik olarak RTL modu devreye girer. Bunun sayesinde, drone kalktığı yere otonom bir şekilde geri dönüş sağlar. 4
Not: Failsafe modu adından da anlaşılacağı gibi cihazı üzerinde meydana gelecek (RC bağlantısı kesilmesi, telemetri sinyalinin kesilmesi, düşük batarya, gps arzası vb.) sorunlarda hava aracına zarar gelmemesi için drona müdahale etme sistemidir.
3) ALT Hold
Öncellikle dronun RC kumanda gaz kolu kalkış anında yarım ve üzerine alınır. Drone havada iken gaz kolu sıfır dereceye bile çekilse motorlar durmaz. ALT HOLD modu dronların Yaw, Roll ve Pitch yönlerinde kontrol edilmesini sağlar. İlk kez drone uçuşu gerçekleştirecek olanlara bu mod tavsiye edilir.
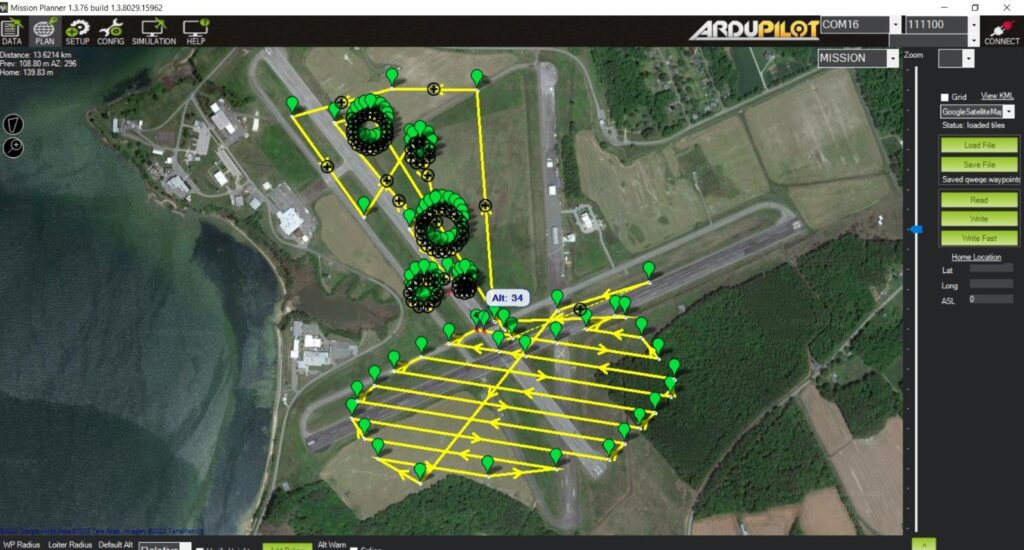
4)AUTO
Dronun belirlenen konumda ve irtifada istenilen görevi otonom olarak gerçekleştirdiği moddur. AUTO modu kullanmadan önce cihazın GPS ve IMU kalibrasyonu kontrol edilmelidir.
5)AUTOTUNE
Dronun havada PID ayarlarının istenilen yükselikte yapılmasını sağlar. Kalkış, ALT hold modu ile gerçekleştirilir. Belirlenen yüksekliğe geldikten sonra autotune moduna alınarak drone belirli bir alanda PID ayarlarını tamamlar. AUTOTUNE yapıldığı esnada eğer istenilmeyen bir alana yakllaşılırsa (ağaç,elektrik direği vb.) tekrardan althold moduna alınarak düzeltilebilir. Sonrasında autotune moduna alınarak PID ayarları kaldığı yerden devam eder. Görev sona erdiğinde yer istasyonuna bildirim gelir ve althold moduna alınarak drone indirilir. Dronu indirdikten sonra disarm ederek PID ayarlara başarı ile kaydedilir.
6)BRAKE
Dronun hareket anında brake komutu ile olduğu konumda, irtifa ve yönde sabit olarak kalmasını sağlar. Brake komutu uygulandığında kumanda kollarından gelen komutlar dronu hareket ettirmez. Sabit bir şekilde havada kalır.
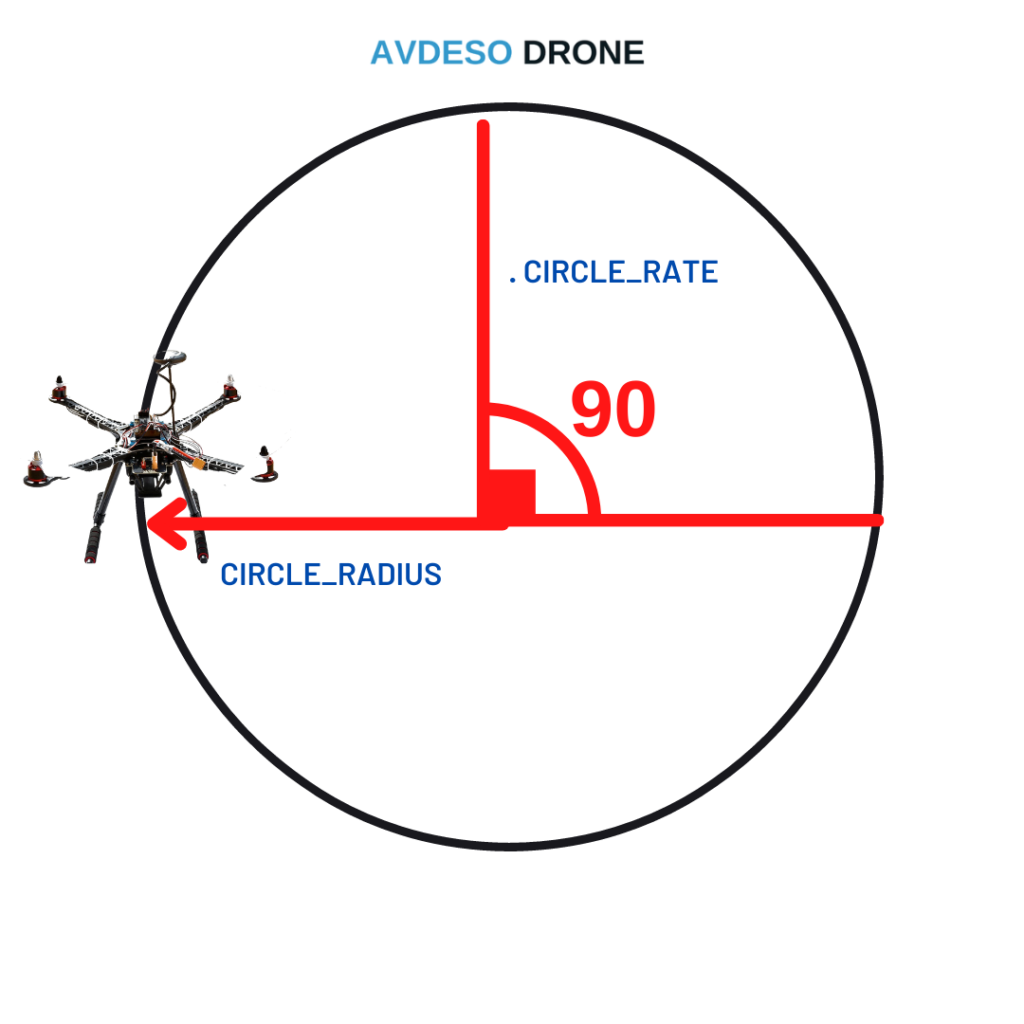
8)Circle
Circle modu dronun belirlenen çapta havada daire halinde dönmesini sağlar. Dronun burnu daire merkezine dönük olacak şekilde dönebilir. CIRCLE_RADIUS parametresi ile dronun dönüş çapı ayarlanır. CIRCLE_RATE parametresi ile dronun 1 saniyede kaç derece dönüş yapılması istenildiği ayarlanır.
9)FlowHold
FlowHold modu, GPS’e ihtiyaç duymadan istenilen konumda ve irtifada dronu havada tutmak için optik akış sensörü kullanır.
10) Land
Land modu aktif hale getirildiği anda bulunduğu yere iniş sağlar. İnişin hızı LAND_SPEED parametresi ile belirlenir.
11)Stabilize
Yeni başlayanlar için uygun bir mod değildir. Pilotun sürekli olarak gaz ayarını ayarlaması gerekir. Kumanda kolunun roll veya yaw ekseninde hareketi sonrasında otomatik olarak kendini sabitler. Araç rüzgar tarafında sürekli olarak itilirken yaw veya roll ekseni sürekli olarak kontrol edilir.
12)Throw
Throw modu Ardupilot’ın en eğlenceli modlarındandır. Pilot, dronu havaya fırlattığında motorlar devreye girer. Bu modda GPS gereklidir. THROW_NEXTMODE parametresi dronun atışından sonraki uçuş modunun ayalanmasını sağlar. Bu parametre sayesinde, drone atıldıktan sonra istenilen göreve devam etmesi sağlanır.
13)Acro Modu
Acro modu pilotajlık açısından en zor mod olarak bilinir. Her eksende dronun açısal hızını kontrol etmek için RC kumanda çubuklarını kullanır. Acro modu, akrobasi ve dronun anlık hız kontrolü istendiğinde çok kullanışlı bir mod olarak kullanılır. Bu mod GPS gerektirmez fakat acil durumlarda RTL( Başlanguç yerine dönüş) modunun kullanılması için GPS kullanmanızı öneririz.
14)Simple/Super Simple Mode
Simple Mode: Simple mode dronu uçurmaya başlamadan önce dronun ön yüzünün baktığı tarafı dronun ön tarafı olarak kabul eder. Uçuş esnasında yaw ekseninde dronun dönmesi sonucu drone ön istikameti üzerinde değişiklik olmaz. İlk kalkış anındaki pusula yönüne göre dronun ön tarafı gidiş yönü olarak referans alınır. Bu komut sayesinde pilotların derinlik kaybından dolayı yaşadığı dronun ön ve arka yüzü tanımlanması sorununa çözüm olur.
Super Simple Mode: Dronun kalkış yaptığı alanda 10 metrelik yarı çapının içinde doğrusal olarak dronun ön kısmı kalkış yaptığı alana bakacak şekilde hareketler sağlar. Böylelikle RC kumandada geri komutu uygulandığında drone ilk uçuş sağladığı alana geri gelir.
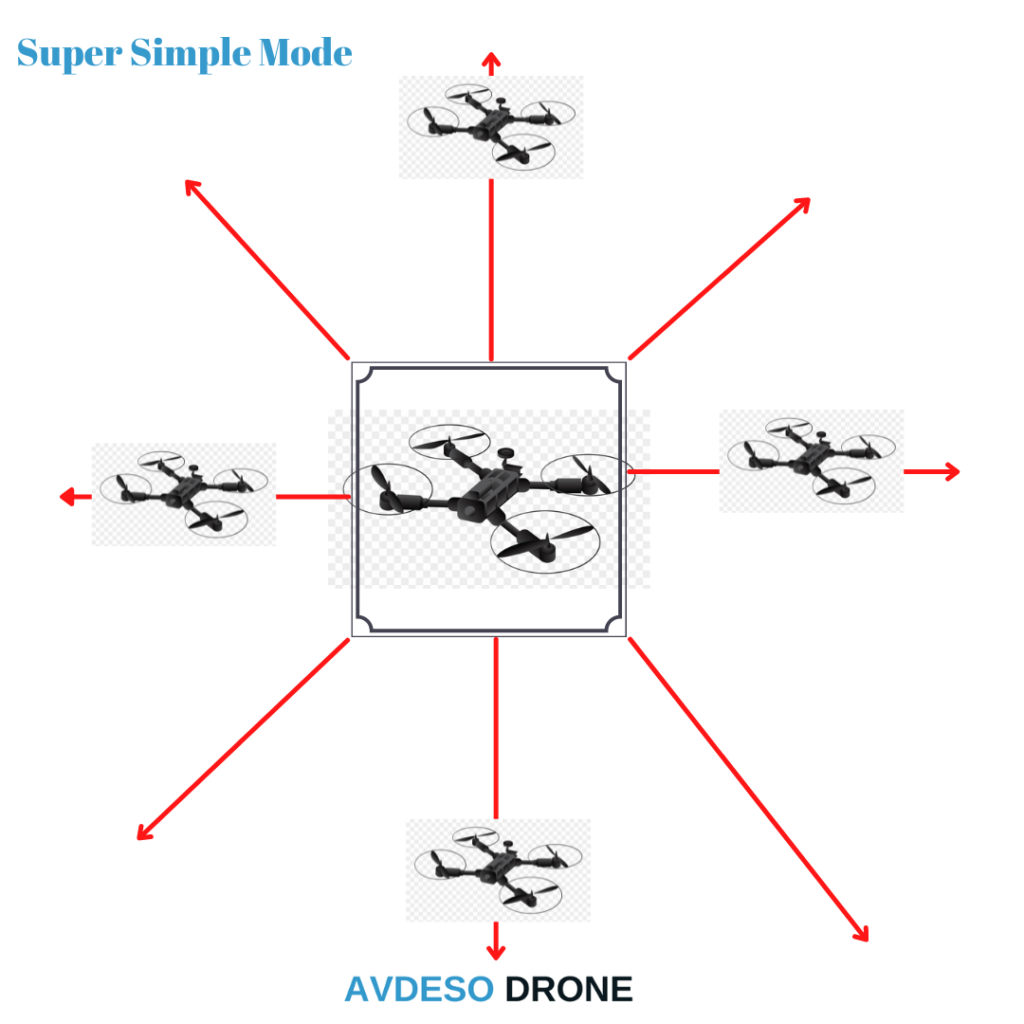
NOT: Simple mode gps gerektirmez iken, super simple modda gps gerekir.






