


Mission Planner programı ,insansız hava araçlarında kullanılan açık kaynaklı bir yer istasyonu programıdır. Pilotun, insansız hava aracını kullanırken sanal bir kokpitte bulunduğu hissini sağlar. Mission Planner programı birçok kullanıcı tarafından tercih edilmektedir. Ardupilot ve PX4 Otopilot yazılımlarında sistematik şekilde çalışabilen program, genelde Ardupilot yazılım tabanlı kullanılır. Bu yazımızda sabit kanatlı insansız hava araçlarında Mission Planner’da bulunan uçuş modlarını ve parametrelerini anlatacağız.
Uçuş modlarına başlamadan önce Mission Planner ve kullanıcı arayüzü hakkında bilgi almak için yazılarımızı okuyabilirsiniz.
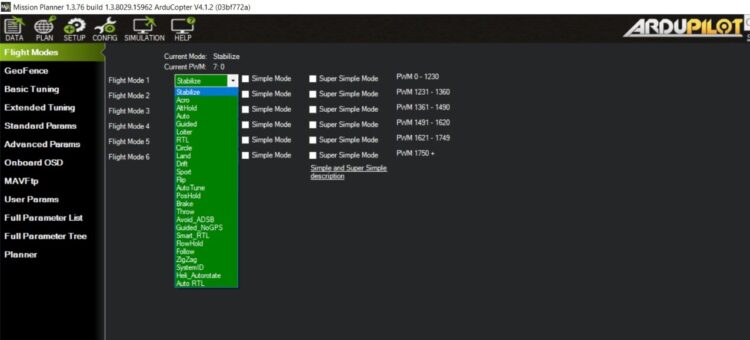
Mission Planner Üzerinde Uçuş Modu Seçimi Nasıl Yapılır?
Mission planner programı üzerinde uçuş modu seçimi için SETUP sekmesinden Flight Modes bölümünden gerçekleşir. RC kumandanızın herhangi kanalına uçuş modu ataması yapılır.
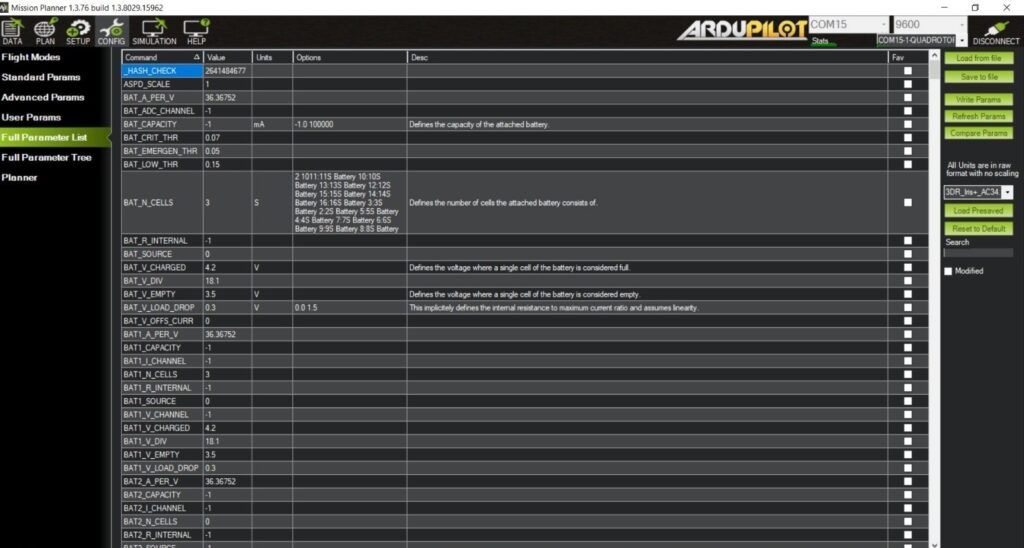
Mission Planner’da parametre değişikliği Nasıl Yapılır?
Öncelikle program üzerinde Configration sekmesi açılır. Sol tarafta yer alan menüden Full Parameter List bölümünde parametre değişikliği yapılmaktadır. Her parametre değişikliğinden sonra Write Params butonuna tıklayarak kaydetmeyi unutmayınız.
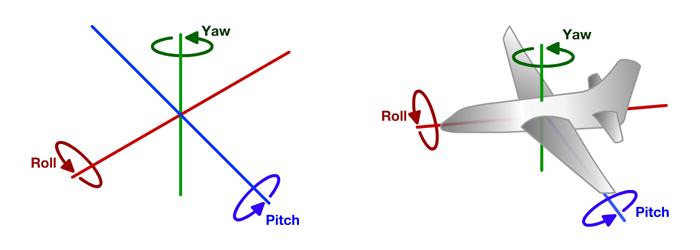
Uçakların Hareket Eksenleri
Uçuş modlarının daha iyi anlaşılmasını sağlamak için aşağıdaki görselde uçak üzerindeki hareket eksenlerini içeren bilgiler paylaşılmıştır.
Sabit Kanatlı İHA’lar için Uçuş Modları
- Manual Mode
- Autotune Mode
- AUTO Mode
- FBWA Mode (FLY BY WIRE_A)
- FBWB Mode (FLY BY WIRE_B)
- LOITER Mode
- RTL Mode (Return To Launch)
- STABILIZE Mode
- TAKEOFF Mode
- CIRCLE Mode
- Acro Mode
Manual Mode
Manual mode, Hava aracı üzerinde bulunan kontrol servolarının direkt olarak RC kumandadan gelen komutlar kontrol edildiği uçuş modudur. Uçuş kontrol kartında bulunan sensörler hiçbir şekilde uçağın stabilizasyonuna müdale etmez. Başlangıç için uygun bir uçuş modu değildir . Pilotaj deneyimi olan kişiler için önerilen bir moddur.
Not: MAN_EXPO_ROLL, MAN_EXPO_PITCH, ve MAN_EXPO_RUDDER parametreleri sayesinde RC kumanda sticklerinden gelen sinyalleri uçağın hareketlerini yumuşatabilirsiniz.
Autotune Mode
Uçağın havada hiçbir müdahale gerekmeksizin otonom olarak ROLL ve PİTCH eksenlerinde PID ayarlarının yapılmasını sağlar. Uçağı ilk olarak manuel olarak kalkışı gerçekleştirilir. Sonrasında, istenilen irtifaya gelindiğinde autotune modu aktif edilerek havada PID ayarları yapılır. Ardından geri manuel moduna alınarak uçak inişi sağlanır ve disarm yapılır. Bu sayede yeni PID ayarları kaydedilir.
AUTO Mode
Yer istasyonunda uçağın belirlenen konumda ve irtifada istenilen görevi otonom olarak gerçekleştirdiği moddur. AUTO modu kullanmadan önce cihazın GPS ve IMU kalibrasyonu kontrol edilmelidir.
Note: Home noktası her zaman uçağınız gerçek kalkış yaptığı noktasında olmasa gereklidir.
Yakın zamanda elden atmalı bir model olan Talon sabit kanatlı İHA modelinin otonom uçuşu için yapılması gereken aşamalara dair bir yazımız yayınlanacaktır.

FBWA Mode (FLY BY WIRE_A)
Yeni başlayan veya uzun menzilliuçuş yapan kişilerin kullandığı popüler uçuş modlarındandır. Pitch ve roll yönleri istenilen dereceye göre limitlenebilir. LIM_ROLL_CD ve LIM_PITCH_MAX/LIM_PITCH_MIN parametreleri uçağın hareket yönlerine göre dereceleri ayarlanır. Böylelikle ilk kez kullanan bir pilotun bile uçağı stalla düşerme ihtimal azalır. FBWA modunda uçağın gazı manuel olarak ayarlanır, fakat dilerseniz HR_MIN ve THR_MAX parametrelerinde gazın max ve min ayarını yapabilirsiniz.
FBWB Mode (FLY BY WIRE_B)
FBWA modundan tek farkı uçağın mevcut irtifasını korumaya çalışmasıdır. Roll yönündeki kontrolü FBWA ile aynıdır. Kumandada elevator çubuğunu ortada bırakarak irtifa aynı olarak kalır. RC kumanda elevator kolunu yukarıya veya aşağıya doğru ittiğinizde orantılı olarak uçak 2 metre/saniye irtifa kazanmaya veya kaybetmeye başlayacaktır. 2 metre/saniye oldukça yavaş bir hızdır. Ancak bu hızı FBWB_CLIMB_RATE parametresi ile ayarlayabilirsiniz.
Not: RC kumanda elevator çubuğunu dilerseniz FBWB_ELEV_REV parametresi ile tersine çevirebilirsiniz. Bu sayede kumanda kolu aşağıya indikçe orantılı olarak uçağın yükselmesi sağlanır.
LOITER Mode
LOITER modunda uçak, loiter’a başladığınız noktanın etrafında daire çizerek belirttiğiniz irtifada uçağı tutar. Dairenin yarıçapı WP_LOITER_RAD parametresi tarafından kontrol edilir, Loiter uçuş modu gps olmadan devreye girmez.
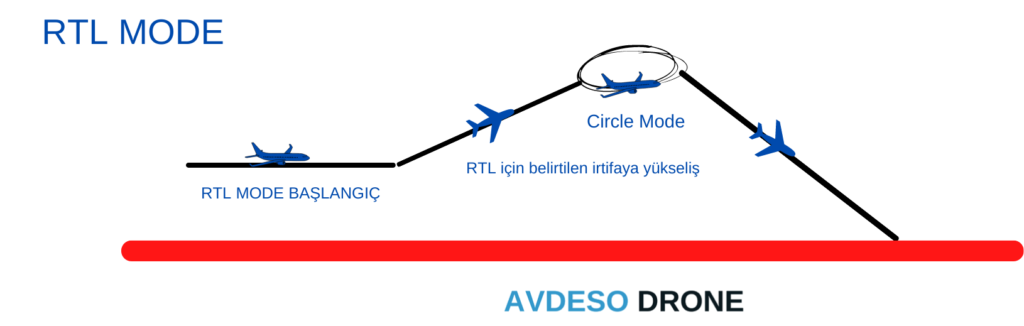
RTL Mode (Return To Launch)
Türkçesi “başlangıç noktasına dönüş”tür. RTL Modu sayesinde uçak uçuş yaptığı esnada kalkış yaptığı Home noktasına ALT_HOLD_RTL parametresinden ayarlanan yüksekliğe tırmanarak RC kumanda ile herhangi bir müdahale gerekmeden geri dönüş yapar. Çok faydalı ve hayat kurtarıcı bir moddur.
Uçak acil bir durumda failsafe moduna geçerse otomatik olarak RTL modu devreye girer. Bunun sayesinde, drone kalktığı yere otonom bir şekilde geri dönüş sağlar.
Not: Uçağın geri dönüş yarıçapı RTL_RADIUS parametresinden ayarlanır eğer değer 0 ise, WP_LOITER_RAD kullanılır. Saat yönünde veya Saat yönünün tersine çevirme, yarıçap için pozitif veya negatif değerlerle ayarlanabilir
ALT_HOLD_RTL
Not: Failsafe modu adından da anlaşılacağı gibi cihazın üzerinde meydana gelecek (RC bağlantısı kesilmesi, telemetri sinyalinin kesilmesi, düşük batarya, gps arzası,IMU hatası vb.) sorunlarda hava aracına zarar gelmemesi için drona müdahale etme sistemidir.
CIRCLE Mode
Circle modu,yarı manuel bir moddur. LOITER’a benzer, ancak farkı irtifasını korumaya çalışmamasıdır. Bu mod sıklıkla uçak failsafe olduğunda, RTL’ye geçmeden önce hava aracının home noktasına dönüşü için belirlenen çapta yükselişe geçtiği moddur.
STABILIZE Mode
Uçağın havadaki stabilizasyonunu sağlayan mod. Havada kumanda kollarını bırakırsanız eğer uçak kendini düzleyecektir. Uçağın stabilize modunda roll veya pitch ani manevralar yapmak mümkün olsada ani dönüşler için uygun değildir. Daha rahat bir uçuş için FBWA modu kullanmanızı tavsiye ederiz.
Not:THR_MINve THR_MAX parametreleri uçağın gaz aralığını ayarlayabilirsiniz.
TAKEOFF Mode
Öncelikle Takeoff modu için bir kalkış açısı ve hedef irtifa belirtilir. Otomatik kalkış sırasında uçak, TKOFF_THR_MAX parametresi tarafından ayarlanan maksimum gazı kullanacaktır. Uçak kalkışını gerçekleştirdikten sonra belirtilen hedef irtifaya ulaştığında TakeOff modu görevini sağlamış olur.
Acro Mode
Uçak pilotajına yeni başlayan kullanıcalar için uygun değildir. Uçak üzerinde keskin manevralar yapabileceğiz bir uçuş modudur. Uçağın her an stalla girme ihtimali yüksektir.Bu modu kullanmanız için ACRO_ROLL_RATE ve ACRO_PITCH_RATE parametrelerini ayarlamanız gerekir. Bunlar varsayılan olarak 180 derece/saniyedir . Her eksene ne kadar duyarlı olacağını kontrol eder.






