


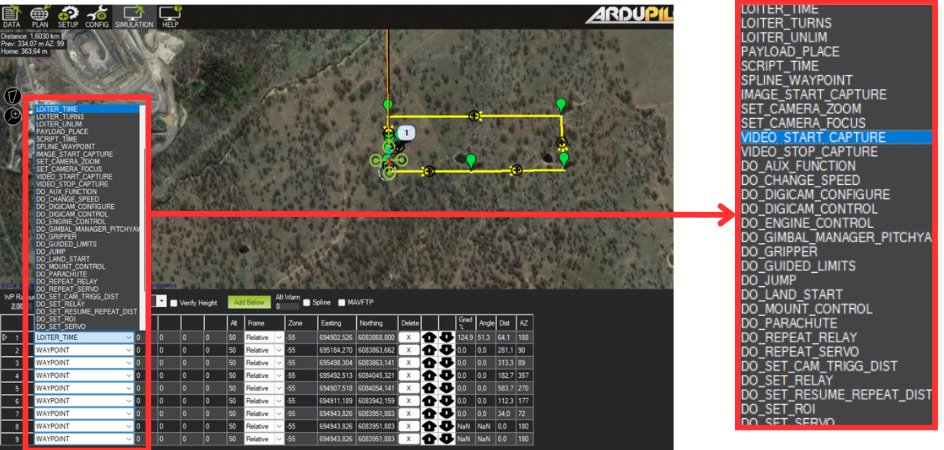
“Mission Planner”, insansız hava araçları (İHA) veya insansız hava araçları sistemleri gibi uzaktan kumandalı veya otonom araçlar için görev planlaması, izleme ve kontrol sağlayan bir yazılım veya uygulama türünü ifade eder. Mission Planner, genellikle kullanıcıların uçuş rotalarını planlamasına, aracın hareketini izlemesine, görev parametrelerini yapılandırmasına ve uçuş verilerini analiz etmesine olanak tanır. Bu yazımızda Mission Planner programında Flight Planner sekmesi üzerinde kullandığımız komutlar bölümünü inceleyeceğiz.
Mssion planner programına dair detaylı bilgileri öğrenmek için yazımızı okuyabilirsiniz.
Mission Planner programın dair detaylı bilgilere erişmek için Udemy’de eğitimimize göz atabilirsiniz. (https://www.udemy.com/course/mission-planner-yer-kontrol-program-egitimi/

1)Takeoff
İHA, kalkış için mevcut konumundan belirtilen yüksekliğe (metre cinsinden) kadar doğrudan tırmanacaktır. Hemen sonrasında sıradaki göreve geçecektir.

2)Waypoint
İHA, enlem, boylam ve yükseklik (metre cinsinden) olarak belirtilen konuma doğru düz bir çizgide uçacaktır.
Delay: Bir sonraki komuta geçmeden önce yol noktasında beklenecek süredir (saniye cinsinden).
Alt: Metre cinsinden insansız hava aracının irtifası.

3)Loiter_Time
İHA belirtilen konuma uçarak ve ardından belirtilen saniye sayısı kadar beklemesidir.
Times: İHA’nın konumda kalınacak saniye değeri.
Lat and Long: Enlem ve boylam hedefleri.
Alt: İHA’nın irtifası

4)Loiter_Turns
Circle uçuş modunun görev eşdeğeri. İHA, belirtilen enlem, boylam ve rakım (metre cinsinden) etrafında bir daire çizerek uçacaktır. Çemberin yarıçapı CIRCLE_RADIUS parametresi tarafından kontrol edilir (yani görevin bir parçası olarak ayarlanamaz). CIRCLE_RATE paramestesi negatif bir sayıya ayarlanarak saat yönünün tersine değiştirilebilir.
Turn – Nokta etrafında tamamlanacak tam dönüş sayısı.
Radius – Waypoint etrafında seyir yarıçapı. Birimler metre cinsindendir.

5)Loiter_Unlimited
İHA belirlenen yere uçacak ve daha sonra süresiz olarak orada bekleyecektir.

6)Return-To–Launch
İnsansız hava aracının kalkış noktasına dönüşüdür. Dönmeden önce ilk olarak RTL_ALT parametresi ile dönüş irtifası ayarlanır. (varsayılan 15m)

7)Land
İHA mevcut konumuna veya belirtilen enlem/boylam koordinatlarına iniş sağlayacaktır.

8)Do-Jump
Göreve devam etmeden önce, belirtilen görev komutuna belirtilen sayıda atlanması sağlanır. Yukarıdaki örnekte araç #1 ve #2 numaralı yol noktaları arasında toplam 3 kez ileri geri uçup sonrasında 4 numaralı yol noktasına uçacaktır.
WP #: Atlanacak görev komutu.
Repeat: Atlamayı maksimum kaç kez yapmamız gerektiğinin belirtir.(-1 her zaman atlamak anlamına gelir)

9)Attitude Time
İHA, belirtilen süre boyunca belirtilen ROLL, YAW, PITCH açısı ve tırmanma oranını(climb rate) korur. Bu komut yürütülürken GPS gerekli değildir.

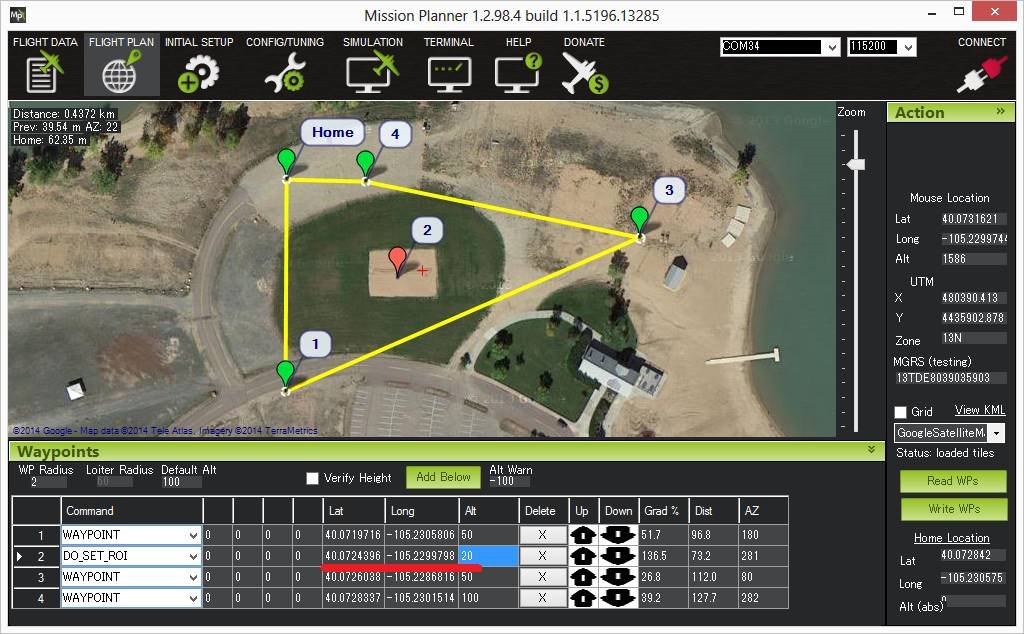
10)Do-Set-ROI
İHA’nın burnu veya kamera gimbali istenilen bölgeye doğrultur. Yandaki örnekte burun veya kamera; kırmızı işaret edilen oku takip edecektir.

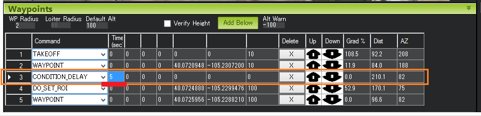
11)Condition-Delay
Bir sonraki göreve geçmeden önce belirtilen saniye kadar geciktirir. Aşağıdaki örnekte İHA Yol Noktası #2’yi geçtikten sonra Komut #4 (Do-Set-Roi) 5 saniye sonra başlayacak şekilde geciktirilir.
Time: Gecikme süresi(Saniye cinsinden)
12)Do-Digicam-Control
Kamera deklanşörünü bir kez tetikleyin. “Shutter Cmd” alanı “1” olarak ayarlanmalıdır.

13)Do-Change–Speed
İHA’nın hızını (metre/cinsinden) değiştirir. Normalde “Type” alanı 0 olarak bırakılır, yani yatay hız ayarlanmıştır.
Type – 0:ground speed, 1:airspeed(if available) 2:climb rate, 3:descent rate

14)Do-Set-Cam-Trigg–Dist
Kamera deklanşörünü düzenli aralıklarla tetiklenmesini sağlayan komuttur. Örneğin yukarıdaki komut, aracın kat ettiği her 5 metreden sonra kamera deklanşörünün tetiklenmesini sağlayacaktır.

15)Do-Set-Servo
Bir servoyu belirli bir PWM değerine taşıyın. Yandaki örnekte, çıkış kanalı 8’e bağlanan servo, PWM 1700’e taşınacaktır (servolar genellikle 1000 ile 2000 arasındaki PWM değerlerini kabul eder).
Ser No: servonun bağlı olduğu çıkış kanalı
PWM: Servoya gönderilecek PWM değeri

17)Do-Digicam-Control
Kamera deklanşörünü bir kez tetikleyin. “Deklanşör Komutu” alanı “1” olarak ayarlanmalıdır.







