İlk kez 1907 yılında Louis and Jacques Bregueth Professor ve Charles Richet Jacques tarafından quadcopter(4motorlu drone) tasarımı ve uçuşu gerçeşekleşti.Her ne kadar başarısız olsa da bu gelişme sayesinde dronlar gelişerek günümüzdeki halini aldı. Quadcopterların diğer hava araçları gibi kendilerine özgü bir uçuş prensibi ve aerodinamiği vardır. Dronların tarihi ile ilgili yazımızı okuyabilirsiniz. Bu yazımızda ‘Dronlar nasıl uçar?’ sorusunu teorik bir şekilde ve örneklerle açıklayacağız.
Dronların Kullanım Alanları Nelerdir? ile ilgili yazımızı okuyabilirsiniz.
Dronlara dair teknolojik gelişmeler için tıklayınız.
Daha fazla teknik yazılarımıza ulaşmak için tıklayabilirsiniz.
NOT:Dronların motor sayıılarına göre çeşileri vardır. (Tricopter – 3 moturlu , Quadcopter – 4 motorlu, Hexacopter – 6 motorlu, Octocopter – 8 motorlu). Hepsinin temel uçma prensibi aynıdır. Biz en popüler olan quadcopteri inceleyeceğiz.
Dronlar Nasıl Uçar?
Quadcopterlerin diğer hava araçları gibi kendilerine özgü bir uçuş prensibi ve aerodinamiği vardır. Kontrol kumandasının üzerindeki stickler(kollar) aracılığıyla dronun manuel olarak hareket etmesini sağlar. Drone uçuş kontrol kartlarının,sensörlerinin ve mikro denetleyici teknolojisinin hızla gelişmesiyle birlikte, istediğimiz hareketleri ve görevleri drona otonom(kendi başına) olarak yapmasını sağlayabiliriz. Quadcopterin manuel veya otonom şekilde hareket etmesinin ana sebebi Newton’un üç temel hareket yasasına dayanmaktadır.
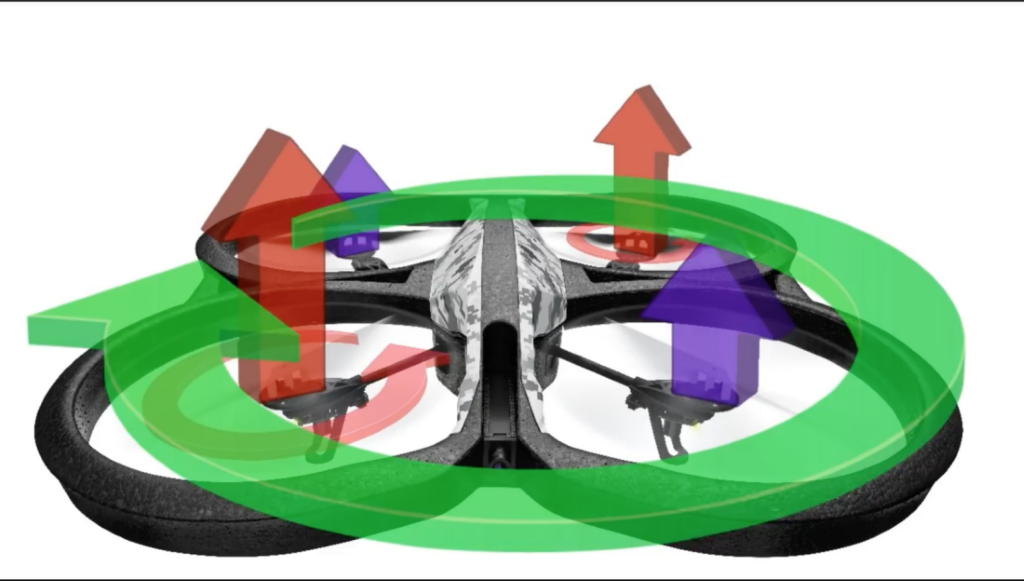
Quadcopterin kenarlarında 4 tane motor vardır. İkisi motor saat yönünde (A veC) diğer ikiside saat yönünün tersine döner (D ve C), motorların zıt yönde ve aynı hızda dönmesi sayesinde motorların toplam aerodinamik tork ve açısal momenti sıfır olur ve quadcopter dengelenmiş olur. Dronun uçma prensibini kısaca özetleyecek olusarak,Newton’un üç temel hareket kanunlarından biri olan 3. kanunun ‘ETKİ TEPKİ ‘ ilkesine dayanır. Eşit hızda dönen pervaneler havayı aşağıya doğru yaptığı iter. Bu ETKİ kuvvetine karşılık,hava drona TEPKİ uygular ve quadcopter havada kalmayı sağlar.
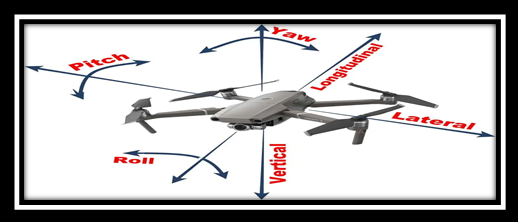
Dronların hareket eksenleri nelerdir? Nasıl hareket eder?
Dronların roll,pitch ve yaw olmak üzere 3 tane hareket ekseni vardır. Dronların bu eksenlerde hareket edebilmesi için pervanelerin hızlarında değişiklikler olur.Bunun ana sebebi net açısal momentumu sıfır yapmak ve havada dengeli bir uçuş gerçekleştirmektir.
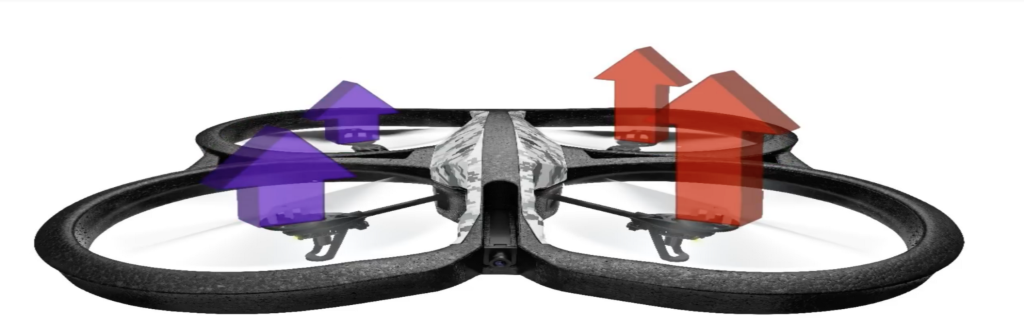
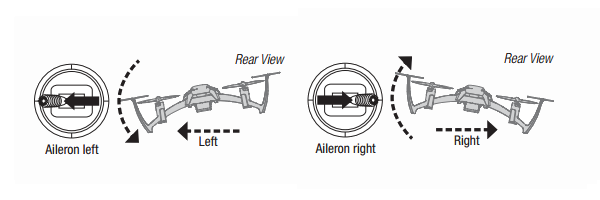
- Dronun sağa veya sola dönebimesidir.
- Dronun döneceği yöndeki motorların hızı düşürülüp tam zıt motorların hızları artırılarak drone sağa veya sola dönüş sağlar.Bu sayede açısal momentum sabit kalır ve drone dengeli bir şekilde dönüş yapar.
- Örnek olarak; sağ tarafa dönecek quadcopterde sağ motorların itme gücü düşürülür ve sol taraftaki motorların itme gücü artırılır
Roll(Yuvarlama):
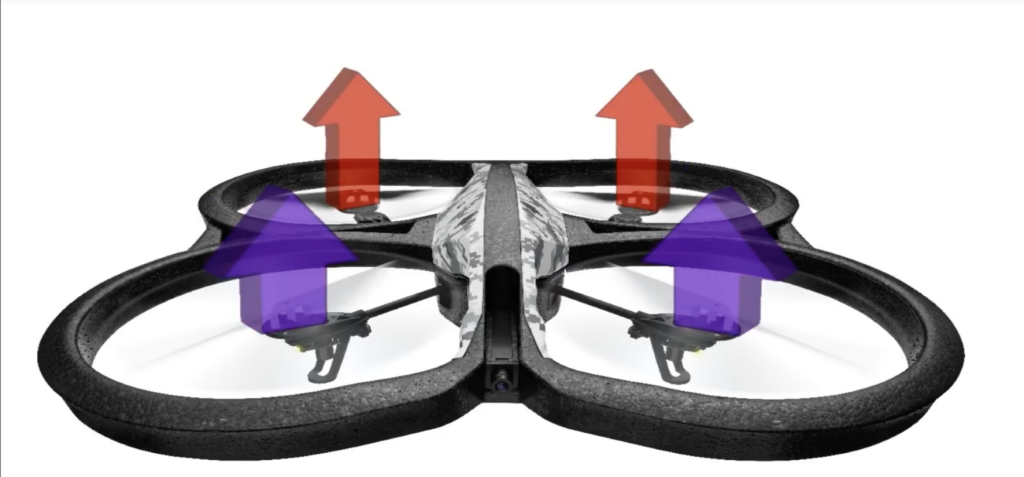
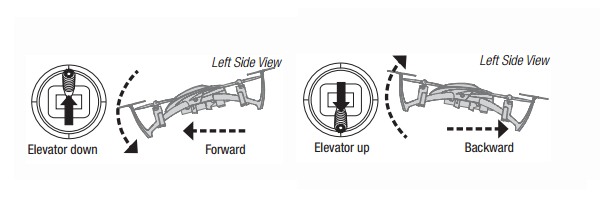
Pitch(Yunuslama):
- Dronun ileri veya geri yönde uçuşudur.
- Dronun gideceği yöndeki pervanelerin yavaşlar ve zıt yöndeki pervaneler hızlanmaya başlar. Bunun sayesinde net açısal momentum korunur(sıfır olur) ,dron ileri veya geri gönde hareket eder.
Yaw(Sapma):
- Dronun kendi etrafında yön değiştirmesidir. Dronun saat yönünde veya tersine dönmesi için dönme yönüne zıt ve dönme yönünde olan pervanelerin hızlarında birtakım değişiklikler olur.
- Örnek olarak şekildeki gibi dronun saat yönüne dönebilmesi için saat yönüne dönen dronların pervanelerinin hızı azalır ve saat yönünde dönen dronların hızı artar.Bunun sayesinde drone saat yönüne dönerek toplam net açısal momentum sıfır olur ve dengeli şekilde dönme gerçekleştirilir.